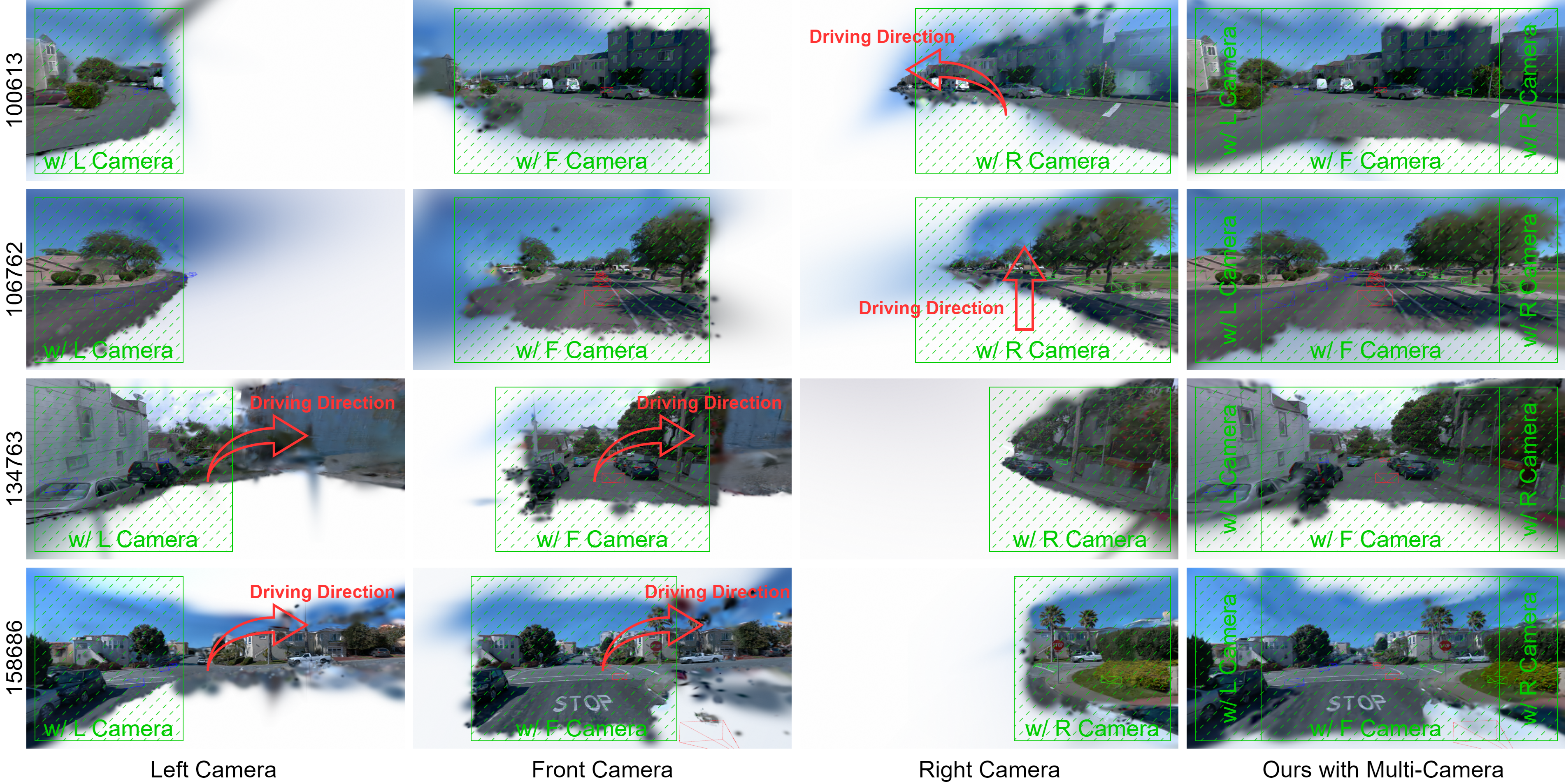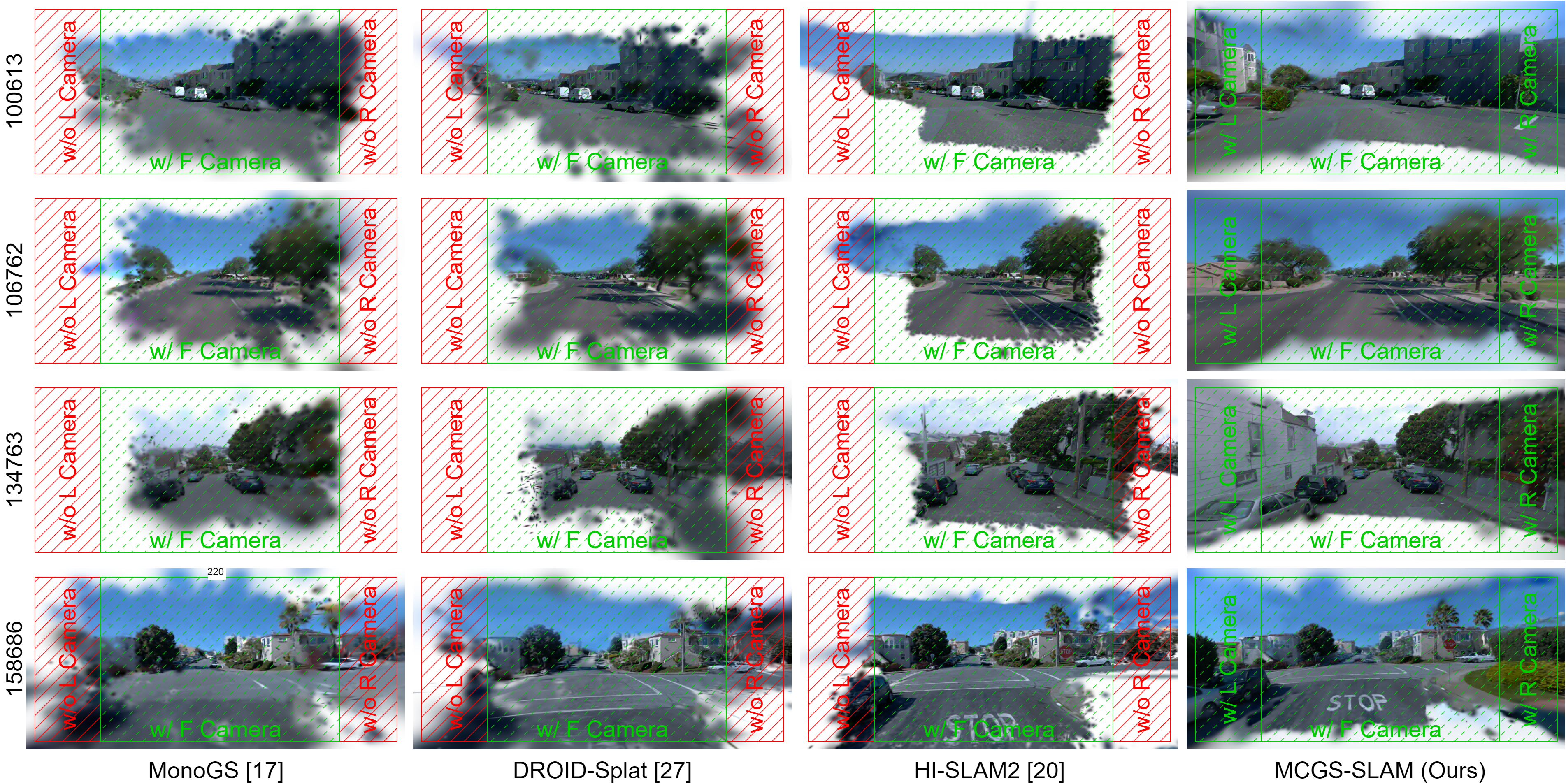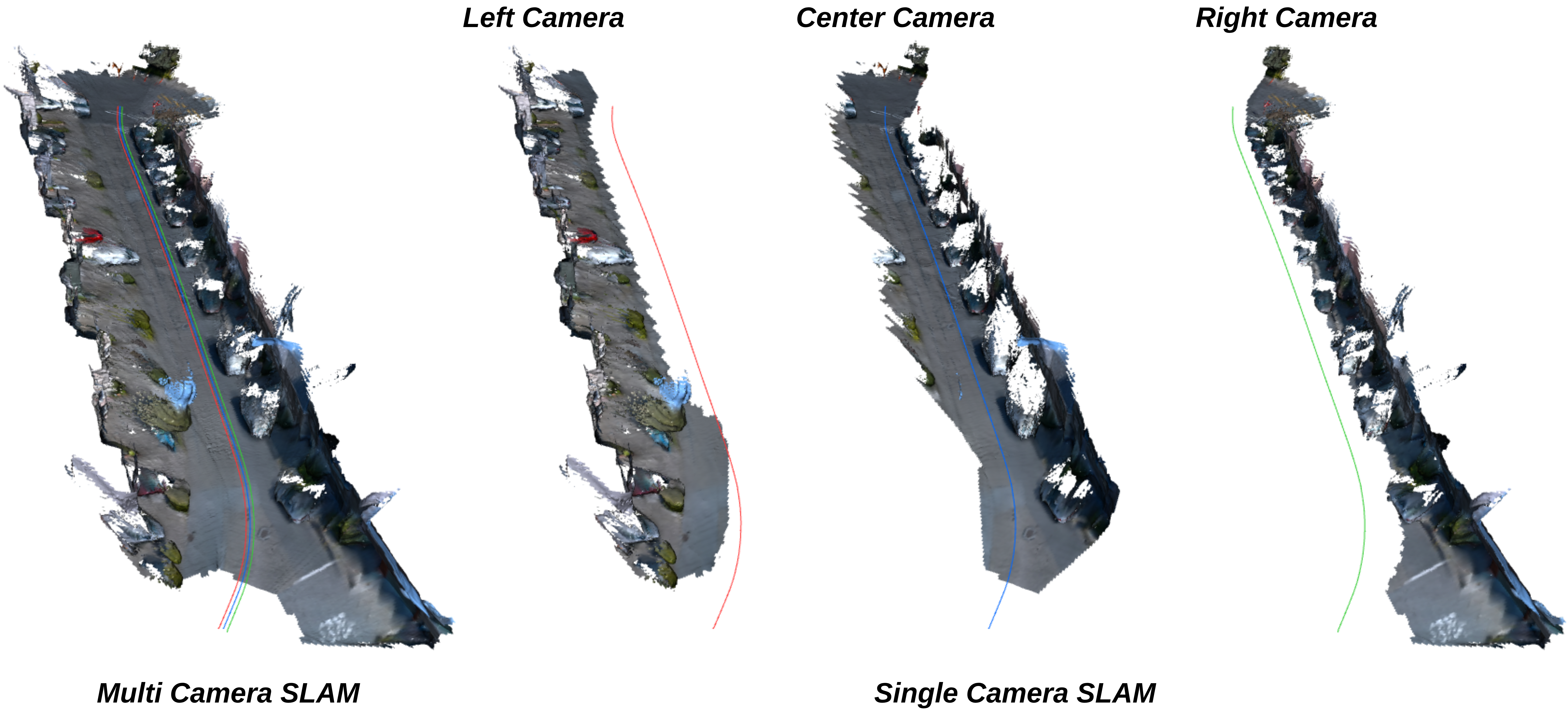
This experiment on the Waymo Open Dataset (Real World) demonstrates the effectiveness of our Multi-Camera Gaussian Splatting SLAM system. We evaluate the 3D mapping performance using three individual cameras, Front, Front-Left, and Front-Right, and compare these single-camera reconstructions against the Multi-Camera SLAM results.
The comparison highlights that the Multi-Camera SLAM leverages complementary viewpoints, providing more complete and geometrically consistent 3D reconstructions. In contrast, single-camera setups are prone to occlusions and limited fields of view, resulting in incomplete or distorted geometry. Our approach effectively fuses information from all three perspectives, achieving superior scene coverage and depth accuracy.